Project Overview
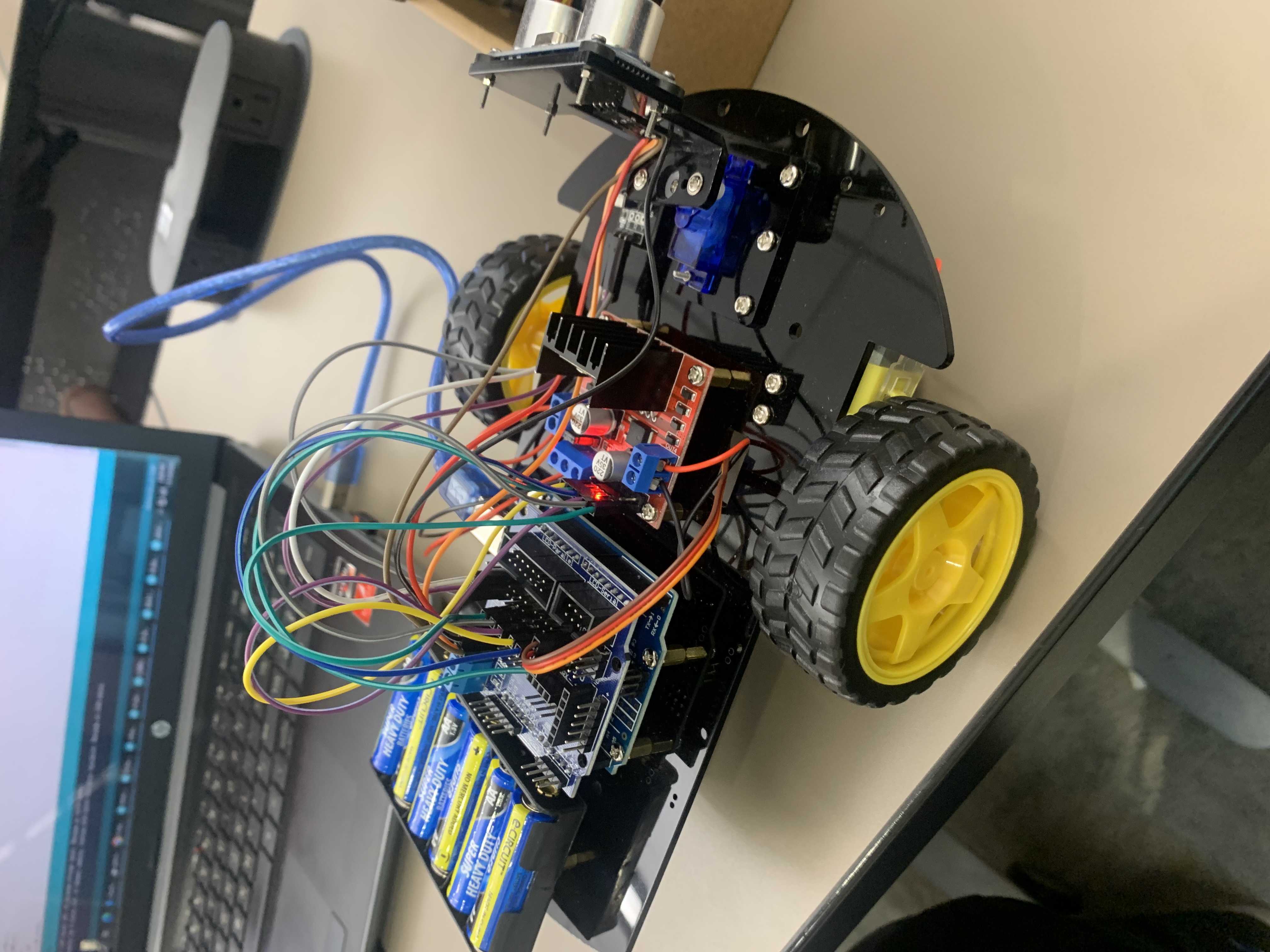
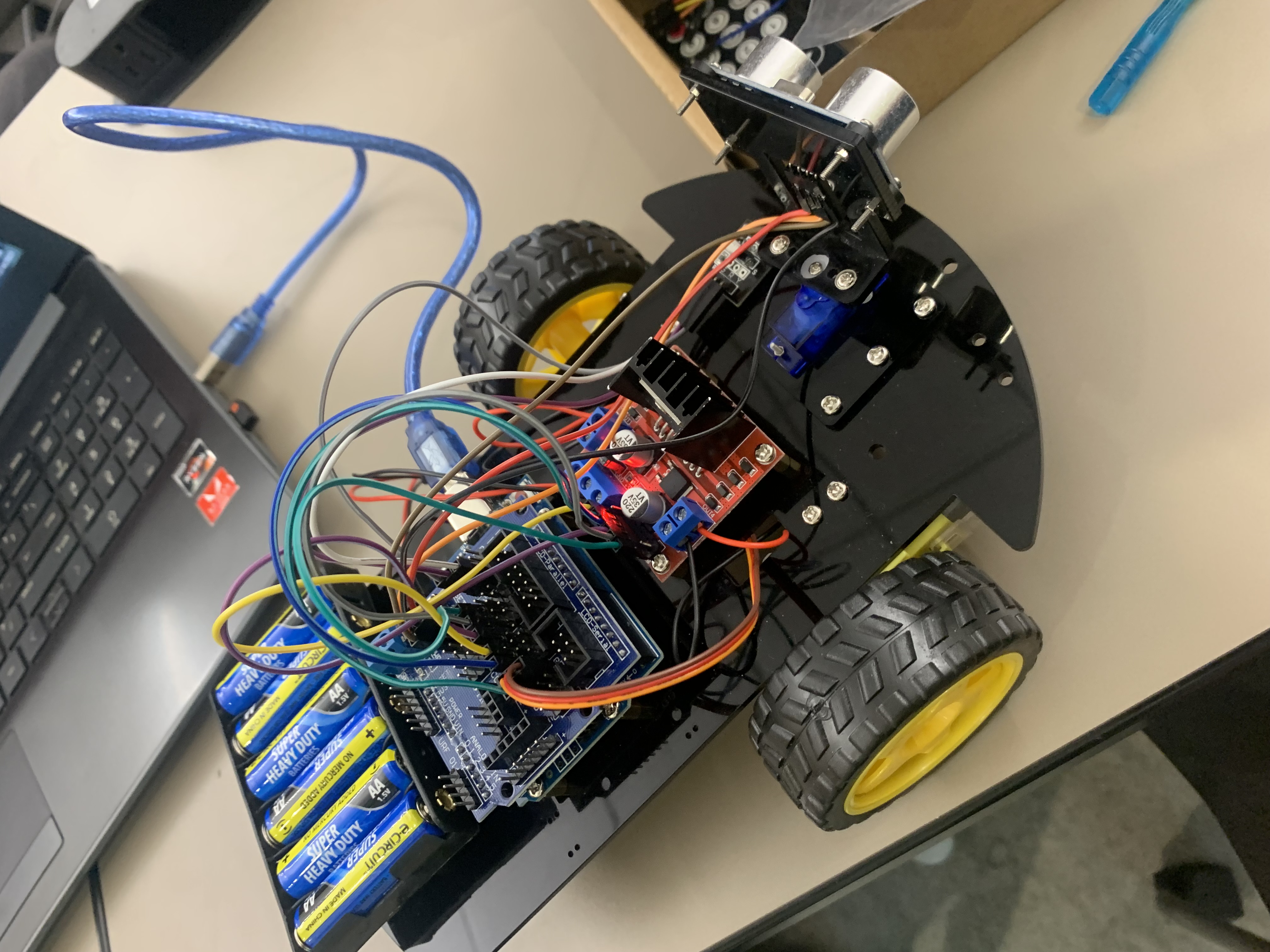
This project showcases a fully autonomous Arduino-based car designed to detect and avoid obstacles using an ultrasonic sensor and servo-controlled steering. The car can navigate its environment without any external control, adjusting its path dynamically when an obstacle is detected within a certain distance.
Technologies Used
 Arduino Uno & Arduino IDE
Arduino Uno & Arduino IDE
Key Features
- • Real-time obstacle detection using ultrasonic sensor
- • Automatic steering via servo motor
- • Autonomous navigation without human input
Project Gallery